A 19. század végén, amikor a kerékpárok használatba kerültek, engedélyt kellett szerezni rájuk. Egy elismert bizottságot állítottak össze a vezetés elméletének és gyakorlatának oktatására, valamint a rendszámtáblák kiadására. Senkinek sem engedték meg, hogy átadja a járművet. Az óvatosságot a kétkerekűvel való közlekedés fokozott kockázatával magyarázták. Egy hétköznapi ember nem érti, hogy egy kerékpár miért nem borul fel mozgás közben. Meglepő módon még a kerekes rendszerek működését tanulmányozó fizikusok sem tudják egyértelműen megválaszolni ezt az egyszerű kérdést.
Elméleti elemzések és fizikai kísérletek kimutatták, hogy a giroszkópos lendület és a pozitív villahossz nem elegendő a kerékpár stabilitásához. Az irányított kormányzás mellett létezik automatikus kormányzás is. Mi több, a terheléselosztás kulcsszerepet játszik az egyensúly fenntartásában. Mint látható, a kerékpár meglehetősen hosszú élettartama alatt még mindig új tulajdonságokat fedeznek fel és finomítanak.
Miért nem borul fel egy kerékpár, amikor vezet
A könnyű feladat magyarázatára gyakran használnak egy metaforát: „ez olyan egyszerű, mint a biciklizés”. Valójában meg kell akadályozni, hogy a közlekedési eszközök lezuhanjanak. Eleinte úgy gondolták, hogy a kerékpár a kerékpáros rovására megy. A személy érzékeli a szerkezet dőlését, a kormányt kissé elfordítja az esés irányába, és kiegyenlíti a menetet. Nagy sebességnél azonban a kerékpár stabilitást nyer, és nem esik el, még akkor sem, ha a kormányt elengedik. Később az első kerék giroszkópikus hatásáról és a kormányzásról is születtek hipotézisek. De kiderült, hogy a nem irányított kerékpárok és a robotkerékpárosok sem esnek el.
A stabilitás okával kapcsolatos fő kérdés: mi okozza a megfelelő kapcsolatot a lean és a turn között? Van egy általánosan elfogadott nézet: a hatás a forgási (giroszkópikus) nyomaték és a pozitív villahatás következményeként jelentkezik. Az első kerék stabilizáló hatása és a mozgás egyenes pályáról való eltérítése által okozott centrifugális erő szükséges tényezők a kerékpár egyensúlyának fenntartásához.
Fizikai szempontból
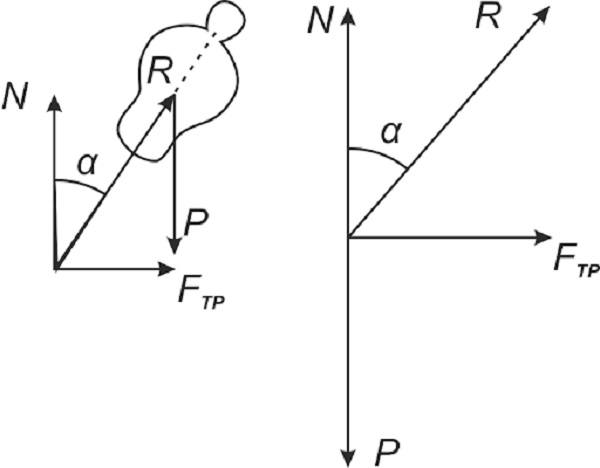
A tudósok azonosították azt a mintát, amely stabilan tartja a kétkerekűeket. Az első villa áll a középpontban. Az elrendezés a kormány tengelyének a talajhoz viszonyított lejtésével jár. A metszéspont a kerékpárkerék és az úttest érintkezési vonala előtt van. Ha a kormányrúd szöge eltér a beállított értéktől, akkor egy reakcióerő keletkezik, amely a szállítót visszahozza a helyére. Így maga a kerékpár segít megtartani az egyensúlyt.
A kanyarodáshoz a lovasnak meg kell változtatnia a súlypontját. Például, ha a kerékpár jobbra dől, az első tengely is jobbra dől, és az óramutató járásával megegyező irányban forgó kerék (alulról nézve) részben átadja a reaktív nyomatékot a kormányműnek. A centrifugális erő hajlamos a kormánykereket jobbra fordítani. A kanyarodáshoz a kerékpáros balra dől, a kerékpárt és a kerekeket jobbra tereli.
A jármű stabilitására használt második tényező a sebességnövekedés lassításkor és kormányzáskor. A stabilizáló hatás a kerekeket a megfelelő helyzetbe állítja, és megakadályozza, hogy a kerékpár felboruljon. Egy tapasztalt kerékpáros a kezét a rögzítési pontokon használva 2-3 mm-t kormányoz az útra.
Gyroszkópikus hatás
Az egyensúly elmélete egy jól ismert fizikai jelenségen alapul, amelyet a világűrben, a repülésben és a tengeri navigációban használnak. A forgó tárgyak azon tulajdonságát, hogy megtartják mozgásirányukat, giroszkópikus erőnek nevezzük. A művelet akkor látható, amikor biciklizés közben megdöntött kerékpárral közlekedik. Amíg a kerekek forognak, a jármű megtartja az egyensúlyát, és soha nem borul fel. Például egy juli vagy gyerekhelikopter csak akkor „működik”, ha forog. A hipotézis tesztelésére a fizikusok egy különleges kerékpár-konstrukciót készítettek. Elöl egy plusz kerék volt felszerelve, amely nem érintette a talajt, és az ellenkező irányba forgott. A kísérlet eredménye meglepte a tudósokat. A kerékpár tökéletesen mozgott, és giroszkóp nélkül sem esett le.
Így, miután megerősítették a kétkerekű mozgásban lévő stabilitását befolyásoló fő tényezőket, a tudósok még mindig új változatokról tárgyalnak.
Érdekes tények
V.A. Jakubovics
- A mozgó kerékpár stabilitását magyarázó matematikai elméletet V. A. Jakubovics, a tudományok doktora terjesztette elő. A tudós elmagyarázta, hogy miért nem sikerült még soha létrehozni egy kerékpárt irányító autonóm robotot. Az interneten keringő, gépi kerékpárosokról szóló információkról kiderült, hogy hamisak. A kibernetikus közelebbről megvizsgálva számos trükköt fedezett fel. A feltalálók súlyokat erősítettek a szerkezet stabilitásának növelése érdekében, csökkentették a súlypontot, és nagy sebességre gyorsították a kerékpárt.
A tudós ellenzői ennek ellenkezőjét bizonyítják. A robot nagyon gyorsan tanul. Ez a feladatok viszonylagos egyszerűségének köszönhető: csak azt kell megtanulnod, hogyan tartsd meg az egyensúlyodat. Olyan képességgel rendelkezik, amellyel az embereknek nincs: azonnal reagál, és másodpercenként 5-ször „rángatja” a kereket.
- Egy kerékpár, amelynek nincs vezetője, automatikusan képes úgy kormányozni magát, hogy ne boruljon fel – állítják az amerikai tudósok. A linearizált stabilitási számításoknak köszönhetően a kutatók olyan kerékpárt terveztek, amelynek plusz kerekei az ellenkező irányba fordulnak, és a kormányállás negatív.
- A pszichológusok nézete eltér a fizikusokétól. A kerékpár energiaforrásai a motoros fejében vannak. Az emberi agy keményen dolgozik azon, hogy ne essünk el. A tudatalatti tartja egyensúlyban a kerékpárost.
Következtetés
A bizonyítékok alátámasztják a giroszkóp és a görgő fontosságát a kerékpár menet közbeni stabilitásának megőrzésében. De nincs egyértelmű magyarázat arra, hogy miért nem borul fel a kerékpár, amikor tekerünk. Lehet, hogy van egy további erő, amelynek megértése átmenetileg meghaladja a jelenlegi ismereteinket.






Mégis úgy gondolom, hogy a kerékpár azért nem borul fel vezetés közben, mert a motoros megtartja az egyensúlyát, és a kormány elfordításával korrigálja azt az esés irányába. A giroszkópos nyomaték hatása a kerékre lovaglás közben valószínűtlen, a kerék sebessége és a kerék tömege nem elég nagy ahhoz, hogy reaktív nyomatékot hozzon létre.
A kormányzási kísérlet nem igazolta, hogy a lovas tartja az egyensúlyt. Nyomja meg a kerékpárt erősen, ha nincs rajta utas, akkor is megy, és nem borul fel, még akkor sem, ha a kormány elakad.